Преамбула
Когда в 2005 году мы с братом увлеклись робостроительством и экспериментами с микроконтроллерами AVR выбор пал на ATMEGA8-16PU, который был достаточно дешев и продавался практически во всех интернет-магазинах электронных компонентов. Так же данный МК обладает небольшими габаритами и хорошими функциональными возможностями. Начало было положено с помощью макетной платы. В процессе изучения работы МК и множестве экспериментов "макетка" быстро пришла в негодность. Конечно очистить плату от остатков припоя и убрать ненужные для очередного проекта элементы задача не слишком сложная, но отнимающая много времени и нервных клеток. Первые попытки создать универсальное средство разработки прошли удачно, но вставало множество проблем с соединениями модулей - приходилось постоянно распаивать новые разъемы, либо опять же подпаиваться непосредственно к плате. В конечном счете первые варианты были окончательно приспособлены на роботов и решено было обратиться к готовым изделиям различных фирм и разработчиков.
 ) Когда окончательно утвердились во мнении, что наиболее удобным
является схема - "базовая плата" + "конкретный модуль под задачу",
наткнулись на открытую платформу Arduino и убедились, что движемся в
верном направлении. От Ардуино были "позаимствованы" расположение
портов и типы разъемов. Было проверено несколько вариантов разводки
плат - мы стремились создать легко повторяемый контроллер, который
сможет повторить любой начинающий в домашних условиях. Один из
"экспериментальных" образцов был обкатан на "полном чайнике" - ему была
вручена плата, документация, программатор и софт. Вечером того же дня
товарищ успешно освоил начальные знания работы с МК и теперь обратно
его отдавать не хочет
) Когда окончательно утвердились во мнении, что наиболее удобным
является схема - "базовая плата" + "конкретный модуль под задачу",
наткнулись на открытую платформу Arduino и убедились, что движемся в
верном направлении. От Ардуино были "позаимствованы" расположение
портов и типы разъемов. Было проверено несколько вариантов разводки
плат - мы стремились создать легко повторяемый контроллер, который
сможет повторить любой начинающий в домашних условиях. Один из
"экспериментальных" образцов был обкатан на "полном чайнике" - ему была
вручена плата, документация, программатор и софт. Вечером того же дня
товарищ успешно освоил начальные знания работы с МК и теперь обратно
его отдавать не хочет  Этот эпизод показал - концепция и ее решение были выбраны верно, что и
побудило нас опубликовать всю информацию по нашему робо-контроллеру.
Этот эпизод показал - концепция и ее решение были выбраны верно, что и
побудило нас опубликовать всю информацию по нашему робо-контроллеру.
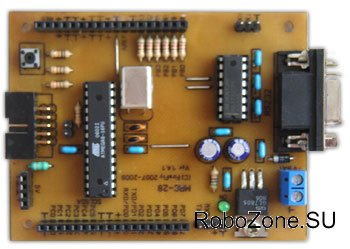
Схемотехника MRC28 не представляет из себя ничего экстраординарного - все элементы включены по рекомендациям производителей. Главным достоинством этого устройства, как мы считаем - удобство в использовании. Естественно доступность компонентов и легкость повторения в домашних условиях то же являются несомненными достоинствами.
Габариты платы контроллера обозначились в результате экспериментов с компоновкой. Эти габариты комфортны при разведении односторонней платы с минимум перемычек, удобны при распайке деталей начинающим, визуально- понятное расположение портов и разъемов (что минимизирует количество ошибок при соединении с модулями и внешними элементами), а так же позволяет использовать контроллер в небольших роботах типа мини-сумо, линетрейсер и т.п.
Так же концепция контроллера предусматривает наличие верхнего модуля (с такими же размерами), разрабатываемого под конкретный проект. Таким образом можно обойтись всего двумя платами для множества задач, притом нижнюю – сам робокотроллер, можно использовать для многих проектов без изменений в схеме.
В качестве основного микроконтроллера выступает ATMEGA8-16PU в DIP-корпусе. Так же без каких либо изменений в схеме можно использовать ATMEGA168-20PU или перспективный микроконтроллер от ATMEL - ATMEGA328P. Все эти микроконтроллеры полностью совместимы по выводам и командам. Закономерен вопрос - "почему не МК с большим количеством портов? Например ATMEGA32?" Ответ прост - во первых цена, во вторых габариты, в третьих портов и функционала 8-й хватает "за глаза" для подавляющего большинства любительских проектов - главное грамотно их распределить по задачам и писать прошивку соответствующим образом. При нехватке памяти программ ставим 168-ю (16Кб памяти) и в перспективе 328-ю (32! кб памяти). Соответственно совместимость с постоянно развивающимся открытым проектом Arduino то же не маловажна.
Тактирование МК осуществляется от внешнего кварцевого резонатора на 16Mhz - запускаем на максимум
(в случае использования 168 или 328-й меги, кварц можно поставить и на
20MHz). Если нет под рукой кварца необходимого номинала - ставьте 4 или
8MHz (они достаточно распространены), но не забывайте учитывать эти частоты в своих проектах.
Связь с персональным компьютером реализована посредством СОМ-порта, а конкретно с помощью микросхемы - преобразователя уровня TTL MAX232CPE, так же в исполнении DIP (внимание: напрямую линии TX и RX микроконтроллера соединять с СОМ-портом компьютера нельзя!). На плате дополнительно выведен разъем для самодельного коммуникационного кабеля (раздел "Начинающим"). При отсутствии в компьютере СОМ-порта есть возможность использования конверторов USB->COM (выведен соответствующий разъем). Так же на данные дополнительные разъемы можно подключить различные модули беспроводного канала связи с ПК.
Контроллер имеет
собственный стабилизированный источник питания на 5 вольт и с
максимальным током на выходе до 1,5 ампер. Таким образом, можно питать
достаточно много внешних модулей и устройств от самого контроллера. В основе источника питания лежит популярный и недорогой линейный стабилизатор L7805
(иностранный аналог отечественной КРЕН5). Рекомендуемый диапазон
подаваемых внешних напряжений на стабилизатор – от 7,4 до 12 вольт.
Меньше нельзя, так как на нем присутствует падение от 1,5 до 2,5 вольт
(зависит от производителя и конкретной модели) и стабилизатор перестает
стабильно работать. При желании, и без каких либо изменений в схеме,
можно использовать LOW-DROP регуляторы
– они могут работать при более низком входящем напряжении (к примеру -
LM2940CT) Единственным недостатком «лоу-дроп» регуляторов является их
цена. Предлагаемое назначение и маркировка портов контроллера MRC28.
Печатная плата и перечень используемых компонентов.
-
разъемы J1-J2 и J3 – прямые гнезда на плату PBS-18
- разъем J4 – прямое гнездо на плату PBS-4
- разъемы J1,J5 и J6 – прямая штыревая вилка серии PLS (приобретайте длинную и отламывайте от нее сколько необходимо – так дешевле)
- Клеммник питания V1 - клеммник винтовой, 2-контактный, 5мм, прямой.
- Разъем COM-порта - DRB-9F розетка 9 pin на плату.
- Дроссель L1 - EC24-100K, 10 мкГн (визуально похож на резистор).
- Кварцевый резонатор 16 MHz HC-49S – усеченный. На фото стоит обычный – в тот момент не было нужного =)
- Электролитические конденсаторы С1 и С4 серии К50-35 «мини» на 16 вольт.
- Остальные конденсаторы – керамические, импортные, серии К10-17.
- Все резисторы 0,25 ватт 5-10%.
- Защитный диод в цепи питания VD1 – 1N4004
- Светодиод HL1 – любой с диаметром корпуса 3мм.
- Кнопка RESET - TC-0103 (TS-A2PS-130) кнопка тактовая h=5мм (расстояние между ногами)
- Стабилизатор VR – любой из серии L7805 в корпусе TO-220 (если есть возможность – ставьте «лоу-дроп» стабилизатор, к примеру - LM2940CT-5.0 TO-220)
- Конвертер уровня TTL IC2 – MAX232CPE DIP16
- Микроконтроллер IC1 – ATMEGA8-16PU DIP28 (ATMEGA168-20PU DIP28)
Источник: http://robozone.su/mrc28/7-universalnyjj-robo-kontroller-mrc28.html

