Простейший робот на одной микросхеме
Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов.
В зависимости от способа соединения моторов, микросхемы и фотоэлементов
робот будет двигаться на свет или, наоборот, прятаться в темноту,
бежать вперед в поисках света или пятиться, как крот, назад. Если
добавить в схему робота пару ярких светодиодов, то можно добиться,
чтобы он бегал за рукой и даже следовал по темной или светлой линии. Принцип поведения робота основывается на "фоторецепции" и является типичным для целого класса BEAM-роботов.
В живой природе, которой будет подражать наш робот, фоторецепция - одно
из основных фотобиологических явлений, в котором свет выступает как
источник информации.
Принцип поведения робота основывается на "фоторецепции" и является типичным для целого класса BEAM-роботов.
В живой природе, которой будет подражать наш робот, фоторецепция - одно
из основных фотобиологических явлений, в котором свет выступает как
источник информации. В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом - ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости. В устройстве робота, кроме микросхемы драйвера моторов L293D, будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить практически любой фототранзистор, фоторезистор или фотодиод. В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой.  Схема робота с одним фототранзистором
На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то исходя из двух схем несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с "землей" (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с "землей". Иногда рядом с такой черточкой пишут три буквы "GND", что означает "землю" (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.
Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом. От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если - небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы предохранить фототранзистор от перегрева и выхода из строя.  Сделать робота, реализующего реакцию фототаксиса (направленного
движения к свету или от света), можно с использованием двух
фотосенсоров.
Сделать робота, реализующего реакцию фототаксиса (направленного
движения к свету или от света), можно с использованием двух
фотосенсоров.Когда на один из фотосенсоров такого робота попадает свет, включается соответствующий сенсору электромотор и робот поворачивает в сторону света до тех пор, пока свет не осветит оба фотосенсора и не включится второй мотор. Когда оба сенсора освещены, робот движется навстречу источнику света. Если один из сенсоров перестает освещаться, то робот снова поворачивает в сторону источника света и, достигнув положения, при котором свет падает на оба сенсора, продолжает свое движение на свет. Если свет перестает падать на фотосенсоры, робот останавливается.  Принципиальная схема робота с двумя фототранзисторами
Схема робота симметричная и состоит из двух частей, каждая из которых управляет соответствующим электромотором. По сути, она является как бы удвоенной схемой предыдущего робота. Фотосенсоры следует располагать крест-накрест по отношению к электромоторам так, как показано на рисунке робота сверху. Также можно расположить моторы крест-накрест относительно фотосенсоров так, как показано на монтажной схеме ниже. 
Монтажная схема простейшего робота с двумя фототранзисторами
 Если мы расположим сенсоры в соответствии с левым рисунком, то робот
будет избегать источников света и его реакции будут похожи на поведение
крота, прячущегося от света.
Если мы расположим сенсоры в соответствии с левым рисунком, то робот
будет избегать источников света и его реакции будут похожи на поведение
крота, прячущегося от света. Сделать поведение робота более живым можно, подав на входы INPUT2 и
INPUT3 положительный сигнал (подключить их к плюсу источника питания):
робот будет двигаться при отсутствии падающего на фотосенсоры света, а
"увидев" свет, будет поворачивать в сторону его источника.
Сделать поведение робота более живым можно, подав на входы INPUT2 и
INPUT3 положительный сигнал (подключить их к плюсу источника питания):
робот будет двигаться при отсутствии падающего на фотосенсоры света, а
"увидев" свет, будет поворачивать в сторону его источника.Чтобы сделать робота, "бегающего" за рукой, нам понадобятся два ярких светодиода (на схеме LED1 и LED2). Подключим их через резисторы R1 и R4, чтобы скомпенсировать протекающий через них ток и предохранить от выхода из строя. Расположим светодиоды рядом с фотосенсорами, направив их свет в ту же сторону, в которую ориентированы фотосенсоры, и уберем сигнал с входов INPUT2 и INPUT3.  Схема робота, движущегося на отраженный свет
 Задача получившегося робота - реагировать на отраженный свет, который
излучают светодиоды. Включим робота и поставим ладонь перед одним из
фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь
немного в сторону так, чтобы она скрылась из поля "зрения" одного из
фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Задача получившегося робота - реагировать на отраженный свет, который
излучают светодиоды. Включим робота и поставим ладонь перед одним из
фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь
немного в сторону так, чтобы она скрылась из поля "зрения" одного из
фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.Светодиоды следует подбирать достаточно яркие, чтобы отраженный свет устойчиво улавливался фототранзисторами. Хороших результатов можно достичь при использовании красных или оранжевых светодиодов с яркостью более 1000 мКд. Если робот реагирует на вашу руку только тогда, когда она почти касается фотосенсора, то можно попробовать поэкспериментировать с листочком белой бумаги: отражающие способности белого листа намного выше, чем у человеческой руки, и реакция робота на белый листок будет намного лучше и устойчивее. Белый цвет обладает самыми высокими отражающими свойствами, черный - наименьшими. Основываясь на этом, можно сделать робота, следующего по линии. Сенсоры при этом следует расположить так, чтобы они были направлены вниз. Расстояние между сенсорами должно быть немного больше, чем ширина линии. 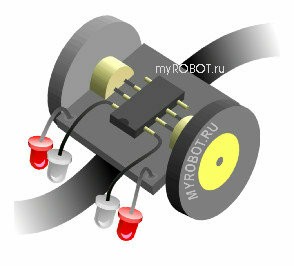 Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы
робот не терял черную линию, нарисованную на белом поле, ее ширина
должна быть около 30 мм или шире. Алгоритм поведения робота достаточно
прост. Когда оба фотосенсора улавливают отраженный от белого поля свет,
робот движется вперед. Когда один из сеносоров заезжает на черную
линию, соответствующий электромотор останавливается и робот начинает
поворачиваться, выравнивая свое положение. После того как оба сенсора
снова находятся над белым полем, робот продолжает свое движение вперед.
Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы
робот не терял черную линию, нарисованную на белом поле, ее ширина
должна быть около 30 мм или шире. Алгоритм поведения робота достаточно
прост. Когда оба фотосенсора улавливают отраженный от белого поля свет,
робот движется вперед. Когда один из сеносоров заезжает на черную
линию, соответствующий электромотор останавливается и робот начинает
поворачиваться, выравнивая свое положение. После того как оба сенсора
снова находятся над белым полем, робот продолжает свое движение вперед.Примечание: На всех рисунках роботов микросхема драйвера двигателей L293D показана условно (только управляющие входы и выходы). |


